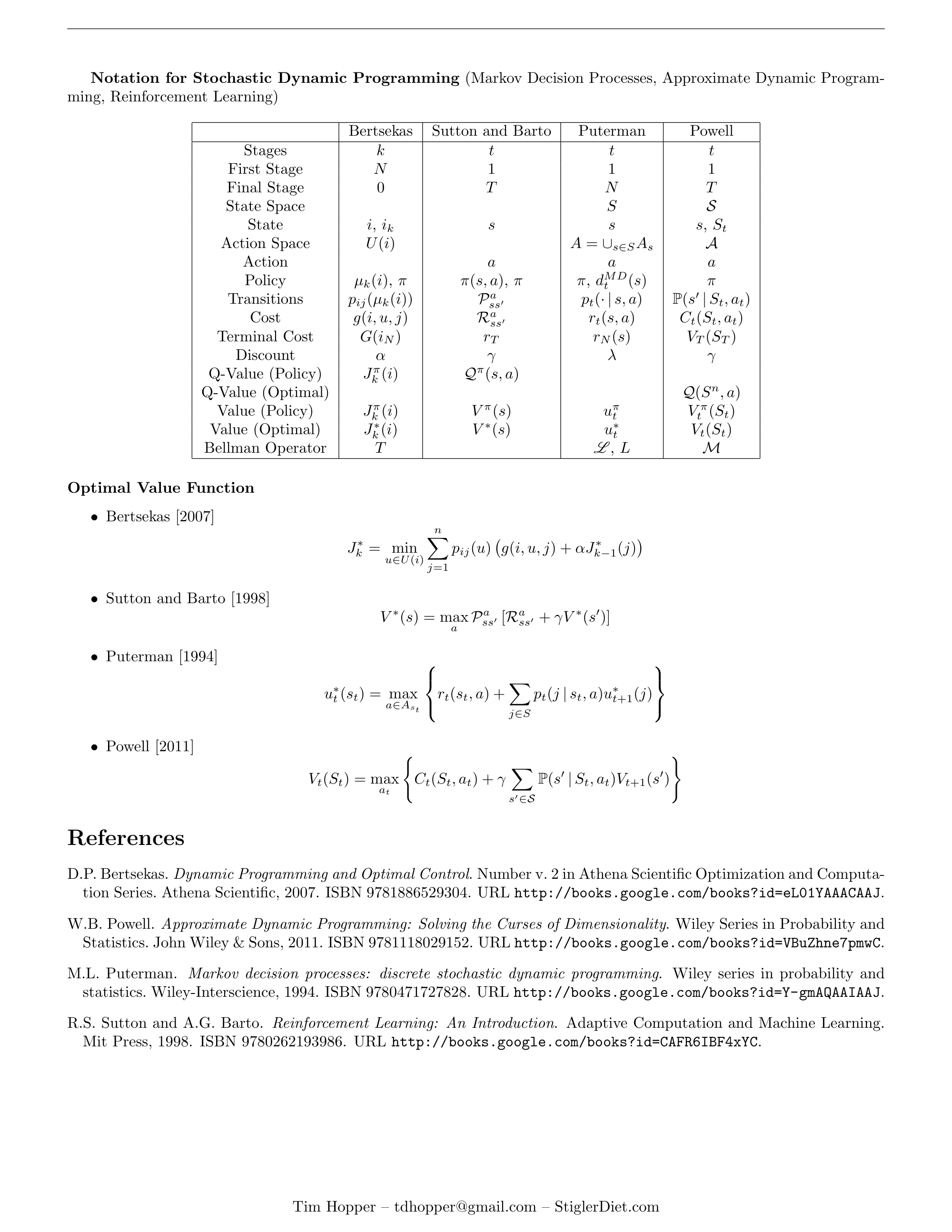
1. MDP,approximate dynamic programming和reinforcement learning的术语公式对照表 § Ref: Rosetta stone for stochastic dynamic programming 应用 § 通过结合律加速矩阵乘法运算
 Ref: Rosetta stone for stochastic dynamic programming
Ref: Rosetta stone for stochastic dynamic programming
Ref: Rosetta stone for stochastic dynamic programming
Ref: Rosetta stone for stochastic dynamic programming