PoE/Twist 旋量法
理论:从Twist的角度看待screw
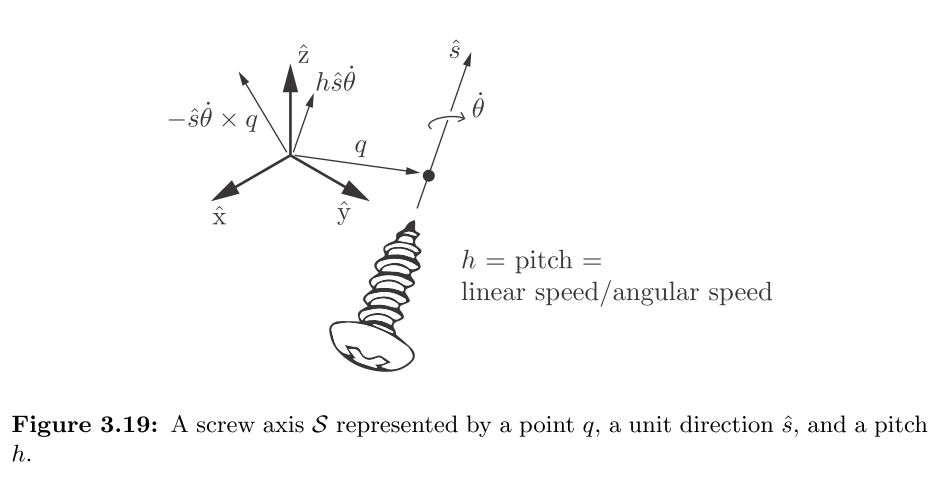
- 从物理性质的角度,想象将一枚螺丝拧到墙里(Modern Robotics, Lynch and Park):
- 一个质点,即
所示原点,所关心的运动发生的点 - 单位向量
用于表征旋转在空间中的方向(螺丝钉轴线) - 旋转轴上的点
,建立一个平面,垂直于旋转轴,并且质点在该平面上。这个平面与旋转轴交于 。 - 螺距
,线速度与角速度的比值(一枚螺丝拧一定角度,对应的可以往墙里钻多深?),之后需要对 是有限的值或者无限大分情况讨论 角速度,即假想中的螺栓旋转的速度
- 一个质点,即
- 上述组成中变量为
,固有构成为 , 和 , 为三维,质点到 为二维(在 和 定义的平面上), 为标量,总计六个维度,所以用它进行变换后得到的定义也应当为六个维度 并不采用 , 和 直接定义screw axis - 物理意义,表征一般化的运动:
- 质心
一边绕着一根轴 旋转(找出物体绕着一个什么样的轴在进行运动) - 从质心画一条垂线到轴
,交于点 , 以一定线速度在前进,这个前进的速度即为
- 质心
- 定义Screw axis,建立一个参照系,原点为质心,坐标系为
。screw axis 所表明的运动分为两种形式: :当 时的参照系 的角速度,即螺线转轴的旋转是如何体现在参照系的每个轴上的 有两种情况,或为单位向量 (将 进行分解),或为 (无旋转) :当 时参照系原点的线速度(三维的平移)。其模 可以为任意值( ?),每个方向上代表线速度的比例。它又由两部分组成: :参照系原点所在平面(垂直于 )的线性运动(也就是 的线性运动) :参照系本身旋转所带来的线性运动 中负号的由来: 图中的坐标系 时绕着 轴旋转的。 的方向是由参照系原点垂直指向 轴(交于黑点)。考虑由角速度计算线速度的公式 中 由圆心指向圆弧,与 反向,因此需要加上负号。
- 针对
分情况讨论(等价于讨论两种不同 作为被除数对 的影响): 旋转轴为单位向量 存在旋转时 为有限的数值: 通过 , , 合成出的旋转方向(通过一根转轴表示),类比于三维的运动合成一个方向向量。 由于存在旋转运动,只要半径存在一定会导致位移,因此即使 为0时也存在平移运动,即运动包含rotation和translation - 当
时 无旋转运动 为无限大 人为规定 ,即为单位向量,此时仅存在平移运动, 用于将运动分解到各个轴向(定义screw axis的目的即使将 , , 进行转化,从而更好的表达 为无穷大的情况)
- 也就是对于归一化的screw axis
,两者其一必须为单位向量( 或 为1) - 将上面的坐标轴与
相乘( 中假定 为1了),得到Twist: - 一些情况可能会对normalized screw axis
和一般性的 混用 和 (Modern Robotics, Lynch and Park) Important: Although we use the pair
for both a normalized screw axis (where one of or must be unity) and a general twist (where there are no constraints on and ), the meaning should be clear from the context
其它
- Adjoint transformation的物理意义:
- 将twist从一个frame中变换至另一个frame
实际:应用screw axis/matrix
应用方法
- 注:此处
, , 与 混用 - 由原点至末端执行器,
,需要找出的参量为home configuration 和 输入变量 为关节,即角度 (转动关节)或位移 (线性关节) 那么需要找出 与 与 二者必有其一为单位向量,根据转轴类型分情况讨论 - 旋转轴:
,指明旋转轴的指向 - 在
中无平动 ,只考察 的部分 由 给出 为 所在的轴(直线)到原点的距离,而不是 所在的frame的原点到世界坐标原点的距离
- 平动轴:
,无旋转 ,用世界坐标系指明平动轴方向
- 旋转轴:
- 找出home configuration
为最后一个坐标系在关节默认位置状态下相对于世界坐标系原点的transformation(原点指向末端点)