实例
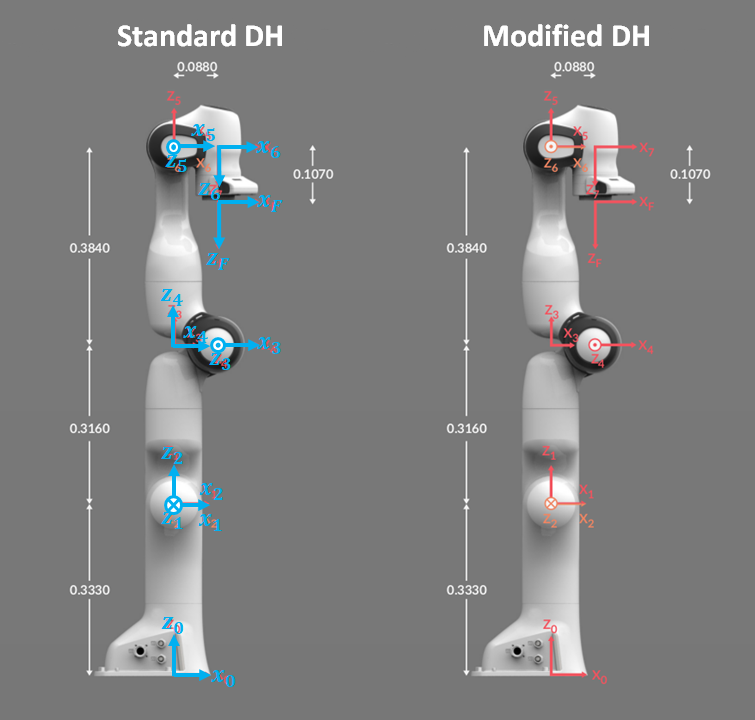
PANDA - Franka Emika
-
Diagram:
-
DH table
Standard (m) (m) (rad) (rad) Modified (m) (m) (rad) (rad) 0 -> 1 Joint 1 1 -> 2 Joint 2 2 -> 3 Joint 3 3 -> 4 Joint 4 4 -> 5 Joint 5 5 -> 6 Joint 6 6 -> e Joint 7 Flange
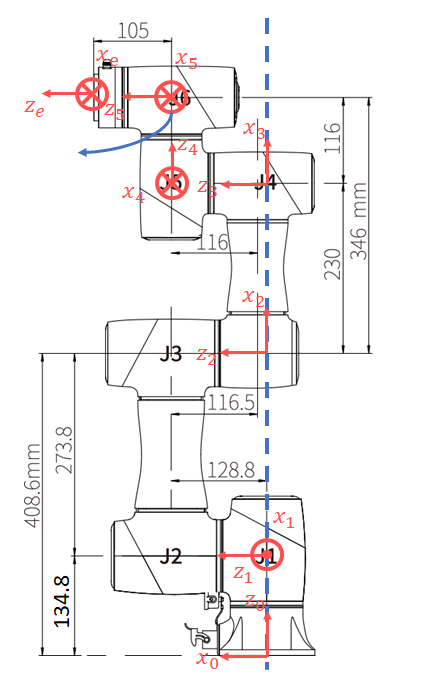
CR3
DH法
-
结构图(采用standard DH)
-
DH (Standard)
(mm) (mm) (rad) F0 -> F1 F1 -> F2 F2 -> F3 F3 -> F4 F4 -> F5 F5 -> EE
PoE
- 结构图
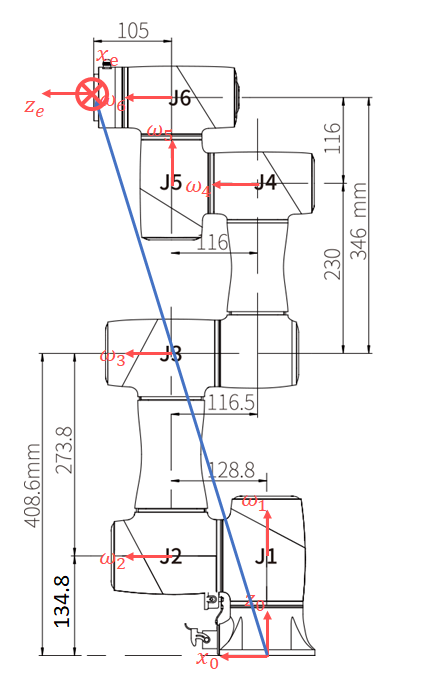
- 第一列为
轴在世界坐标系中的方向。 为世界坐标系中的 ,即 。 - 第二列为
轴在世界坐标系中的方向。 为世界坐标系中的 ,即 。 - 第三列为
轴在世界坐标系中的方向。 为世界坐标系中的 ,即 。 - 第四列前三个参数为末端执行器在世界坐标系下相对原点的位移(蓝色箭头),
方向上为 , 方向上为 , 上无位移。
- 第一列为
,其中 , ,所有关节均为旋转关节。其中 , , , , , , , , , , , , , , ,
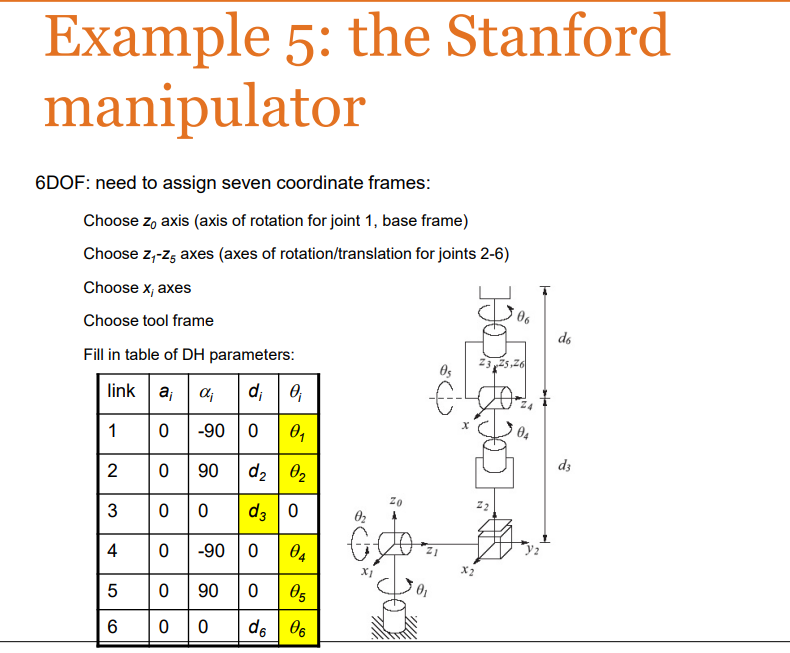
Stanford arm