坐标系的变换
符号定义
- 约定:
表示以0作为参照系,1的旋转变换(也记作 ) 齐次变换,记作 , object transformation with respect to reference frame 对于机器人系统而言,是以父连杆(或机器人基座)作为参照系,子连杆相对其的变换 编程时变量形式的约定r_obj2ref(只包含旋转变换),ht_obj2ref(homogeneous transformation) 例:
旋转矩阵与齐次变换矩阵
- 以
、 、 为轴的旋转矩阵的表示
矩阵的左乘与右乘
结论
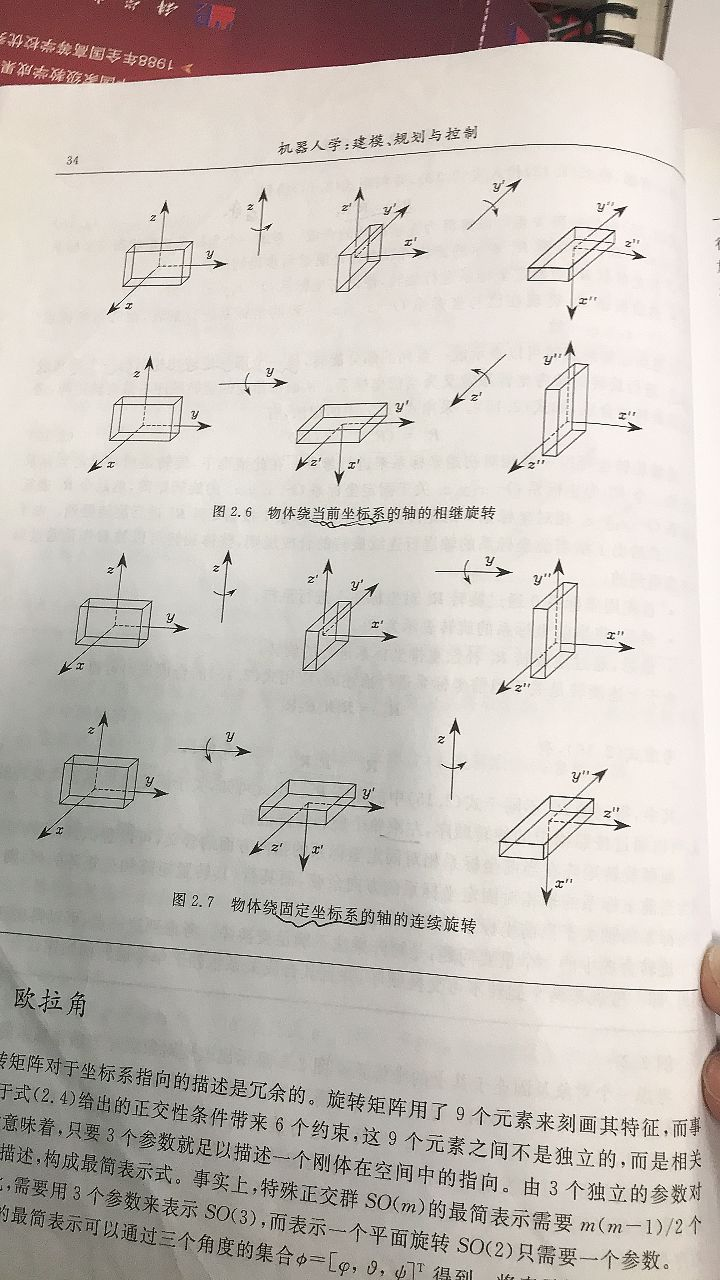
- 以固定坐标系作为参照系进行旋转(如ROS的sxyz),矩阵左乘
- 以活动坐标系作为参照系(或者说在当前的基础上)进行旋转,矩阵右乘
- 图例
直觉
- 直觉1
- 假设从世界坐标出发,
,旋转效果由位于左侧的矩阵产生,作用在右侧的矩阵/向量上(通过直觉不严格的证明:在变换一个列向量时,旋转矩阵应在其左侧),计算时总是从 出发,与其最近的矩阵结合进行运算。 - 计算
时,先计算 ,即 被 旋转,然后运算结果再被 旋转。第n步的旋转矩阵为 ,以世界坐标系为基准。 - 计算
时,先计算 ,即 被 旋转,那么此时变换矩阵的参照已改变(当前坐标系),运算结果再去旋转 。第n步中新的旋转矩阵为 ,以最新的参照系作为基准,对 进行旋转
- 假设从世界坐标出发,
- 直觉2
-
齐次变换矩阵
包含两个部分,旋转 与平移 ,其形式又可等价的表示为 -
计算
时,考虑 ,根据运算律, 先与 结合进行运算( 受到旋转影响)。平移 未受到旋转 的影响(以固定座标系作为基准)。最终结果为 -
计算
时,考虑 ,根据运算律, 先与 结合进行运算(产生旋转作用的是 中的 ,即 未被旋转, 被 旋转)。平移 受到旋转 的影响,由于此时已经在新坐标系下,平移需要回溯 的影响(即 ,以新坐标系为基准)。最终结果为
-
理论
实践
正向运动学
- 在前向运动学中,从机器人的底座开始,下一连杆(子连杆)都是以上一连杆(父连杆)的坐标系为基准进行变换的计算,矩阵右乘:
- 同理在使用DH参数进行计算的过程中,如果用标准形式定义DH参数,也是先
轴,再 轴?
手眼校准
- 假设相机设置为正对机械臂,机械臂上粘贴有二维码,且二维码相对于机械臂基座的位姿已知(
, ht_tag2world)。通过二维码识别可以获得()二维码相对于相机的位姿(参考使用OpenCV检出二维码位姿),则相机相对于基座的位姿为 。若要计算空间中某一点在成像平面上的位置(对应像素点),如基座(假设其为世界原点),则须进行一次变换 ,再投影至二维成像平面。
ht_cam2world = np.dot(ht_tag2world, np.linalg.inv(ht_tag2cam))
origin = np.dot(np.linalg.inv(ht_cam2world), np.identity(4))
px = proj_to_2d(k, origin[0:3,3])欧拉角
俯仰角旋转
- 滚转俯仰有两种解释方式,先定义三个转角
- Roll:以
轴为轴向, Pitch:以 轴为轴向, Yaw:以 轴为轴向,
- Roll:以
- 两种计算方式
- Yaw-pitch-roll(旋转次序为
,以固定坐标系 为基准) - Roll-pitch-yaw
- 每次旋转以上一次旋转后产生的当前坐标系作为基准进行旋转
先以
轴作为旋转轴进行旋转 在旋转后的坐标系下以新的 轴作为旋转轴 在再次旋转后的坐标系下以新的 轴作为旋转轴
- 每次旋转以上一次旋转后产生的当前坐标系作为基准进行旋转
先以
- Yaw-pitch-roll(旋转次序为
- 两者的变换均可以表示为