DH参数
理论
- 将变换统一为
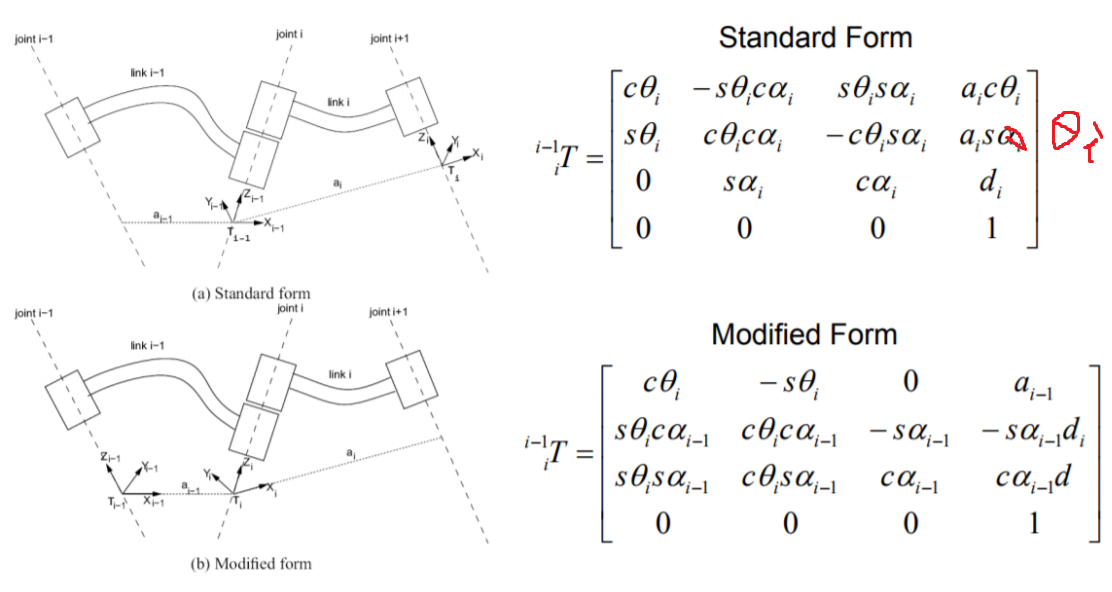
轴方向和 轴方向,再应用 - 共有两种形式,标准型(standard form)和改进型(modified form)
标准形式
- 参考Spong, Mark W., Seth Hutchinson, and Mathukumalli Vidyasagar. Robot modeling and control. Wiley, 2006.
- 步骤
- 以当前坐标系为基准
以当前坐标系中
轴作为转动轴,当前坐标系和下一坐标系的 轴间的角度 ,以及两坐标系原点沿当前 轴的平移 - 以下一坐标系为基准
以下一坐标系中
轴作为转动轴,当前坐标系和下一坐标系的 轴间的角度 ,以及两坐标系原点沿当前 轴的平移
- 以当前坐标系为基准
以当前坐标系中
- 邻近关节坐标的齐次变换矩阵
- 齐次变换矩阵
改进型
- Modified form (Craig, John J. Introduction to robotics: mechanics and control. Addison-Wesley, 1989.)
- 齐次变换矩阵
两种不同形式的对比:
- 对比
You should read this paper: ”Lipkin 2005: A Note on Denavit-Hartenberg Notation in Robotics”. It explains the 3 main DH parameter conventions and how they differ. - 图片来源: Introduction to Robotics Toolbox for MATLAB by Yang Shen UCLA