Ontology本体论/知识库
2024
Ontology Based AI Planning and Scheduling for Robotic Assembly
Jingyun Zhao et al.,TUMunich, IROS 2024
- 结合Ontology database和PDDL planner
Ontology, defined as a ”formal, explicit specification of a shared conceptualization” [2],很多属性的数据合集
Fine-Grained Task Planning for Service Robots Based on Object Ontology Knowledge via Large Language Models
Xiaodong Li et al., Shandong University, RAL 2024
- 通过LLM从任务描述获取任务相关的物品属性,产生fine-grained动作序列。通过BERT和ontology knowledge base获取物品属性?
- 用CLIP将物品属性和对应的图片对齐
- 提出了如果任务执行失败,根据检测到的状态和属性进行重规划的方法
2017
An Ontology Framework for Physics-Based Manipulation Planning
Mohammed Diab et al., Universitat Polit`ecnica de Catalunya, ROBOT 2017
- 针对physics-based manipulation planning任务,设计一个ontology框架以组织这个过程中所需要的知识(knowledge)
- OUR-K (Ontology-based unified robot knowledge),出处:Lim et al., Ontology-based unified robot knowledge for service robots in indoor environments. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 41(3), 492-509 (2011)
- 针对manipulation planning任务,将ontology分为六类, Object类和Context类与OUR-K中定义一致,
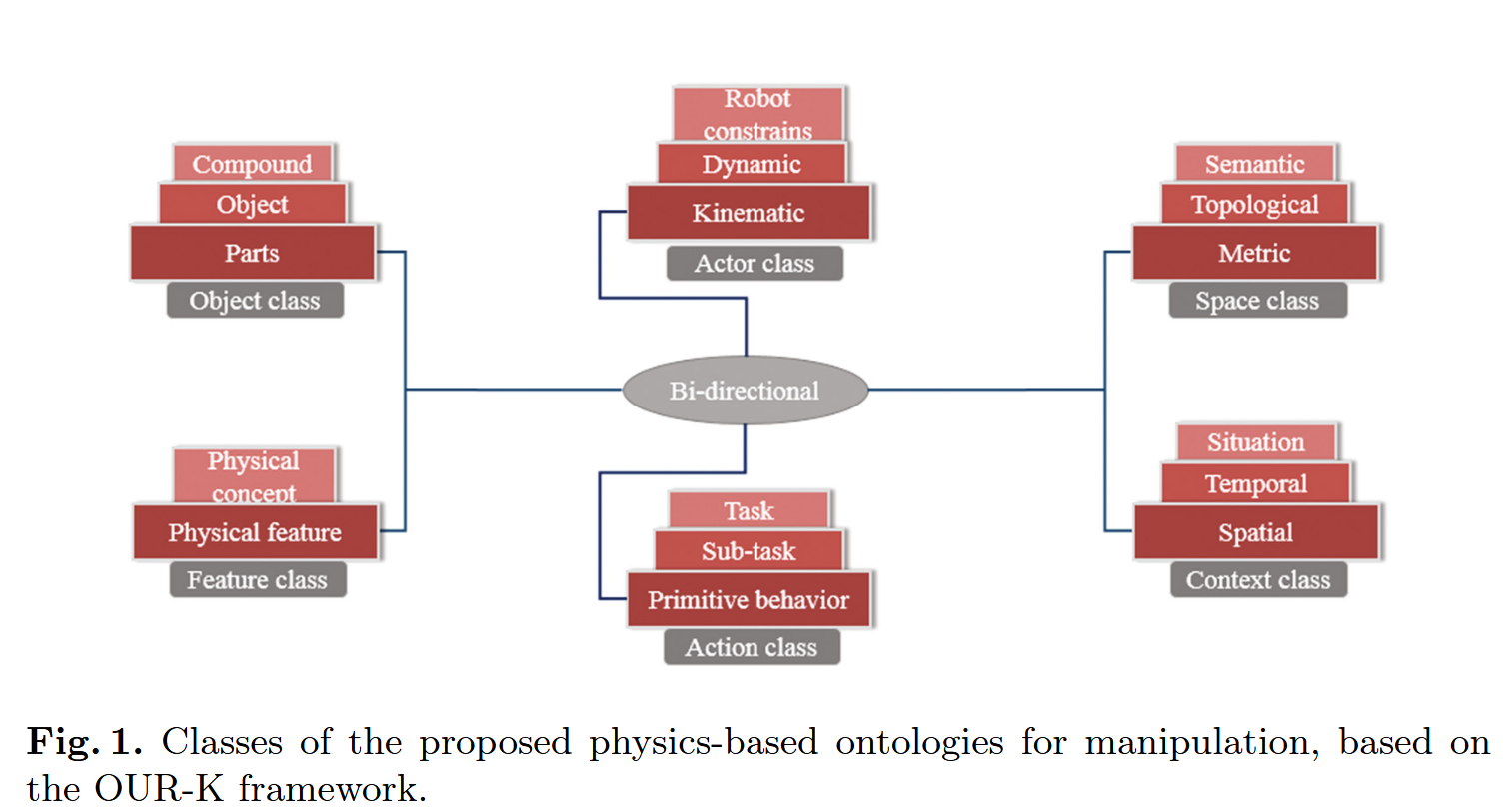
- Space类
- 通过metric和topological建立一个semantic map,前者将环境划分为空置或被占用的区域(
The former defines areas in the environment, which may be empty or occupied),后者包含了空置区域之间的关系(. The latter contains the information of the topology of the free region (e.g. with a graph extracted from a voronoi diagram)) Topological map defines the topology of the workspace, including where the objects are located in the workspace.
- 通过metric和topological建立一个semantic map,前者将环境划分为空置或被占用的区域(
- Context类
Context class is used to understand the situation of the objects in the environment. This situation is derived from two types of relations: spatial and temporal, which are defined in spatial and temporal levels, respectively, such as crowd, which means that the robot will encounter some obstacles. The spatial level contains the spatial relations (such as on, in, left, and right functions) and space classes (semantic map). Temporal level contains the temporal relations such as before, after, overlap, meet.
- Action类
- 对于单体或多个物体
- 单体:Roll、Move、Pull、Push、Pick & Place
- 多个物体:Primitive behavior
- 对于单体或多个物体